Forums » Рыночные перспективы »
Роботы
Added by Natalia_multiclet almost 13 years ago
Применение, обсуждение
Replies (29)
RE: Роботы - Added by PaulAS almost 13 years ago
Планируете аналоги?
- phidgets ( http://www.phidgets.com/products.php?category=21&product_id=1073_0 )
- virt2real ( http://virt2real.ru/ )
- Raspberry Pi ( http://www.koshcheev.ru/2012/01/03/raspberry_pi/ )
- Марсоход ( http://www.marsohod.org/index.php/projects )
RE: Роботы - Added by PaulAS almost 13 years ago
- к таким интерфейсам: http://www.phidgets.com/products.php?category=0
- вот такие инструменты для разработчиков: http://www.phidgets.com/docs/Programming_Resources
есть даже мой любимый руби: http://www.phidgets.com/docs/Language_-_Ruby
- еще-бы датчиков/моторов всяких, ну что-бы разработчик софта мог самостоятельно подключить
- да с пиаром на хабре,опеннете,лоре
(например по аналогии с http://habrahabr.ru/company/virt2real/blog/156491/ )
что-бы простой программист мог взять контроллер/интерфейсы, воткнуть датчики/моторы и накодить что-нибудь
например минимальный набор датчиков сделать как у Lego NXT
http://www.opennet.ru/opennews/art.shtml?num=35780
http://robots-toys.ru/LEGO-Mindstorms/
технические подробности по Lego: http://botbench.com/blog/2013/01/08/comparing-the-nxt-and-ev3-bricks/
например используя еще советские металлические конструкторы
как вот в этом наборе: http://www.ivista.ru/product_info.php/info/p37203.html
что-бы школы то-же могли использовать
думаю все это обречено стать "Рыночно перспективным"
тем более это уже кто-то делает, вероятно не без выгоды для себя
что думаете?
RE: Роботы - Added by krufter_multiclet almost 13 years ago
Это всё здорово и мы это планируем. Было бы неплохо если бы пользователи форума, а также люди, которые используют данные платки написали, что они хотят увидеть на отладочной плате с мультиклеточным процессором. Т.е. попытаться согласовать набор датчиков, периферии, размеры и другие детали платы.
Пока можно писать свои предложения по будущей отладочной плате, мы их все примем к сведению и результатом будет направленная на робототехнику отладочная плата. Хотя что-то можно пробовать уже сейчас на текущих отладочных платах.
RE: Роботы - Added by PaulAS over 12 years ago
А на сколько сложно/долго делать аналог начинки вот этого
http://vi-lib.com/forForum/lego_sensors.jpg
http://makezineblog.files.wordpress.com/2013/08/ev3hardware-large.jpg
описание: http://habrahabr.ru/post/164971/
ИЛИ
Arduino-совместимую плату, что-бы разъёмы ардуиновских модулей расширения подходили
типа: http://www.opennet.ru/opennews/art.shtml?num=38078
RE: Роботы - Added by krufter_multiclet over 12 years ago
Сделать аналог Лего не очень сложно, но это вопрос времени.
Arduino-совместимую плату сделать реальнее, однако что критично нужно для работы с arduino модулями с точки зрения программного обеспечения?
У нас к выходу новой отладочной платы будет Си99, а также ОС без MMU, FreeRTOS, eCos, ulinux и т.п.
Удобно ли будет если в новом процессоре у нас будет 4 канала ШИМ с одним периодом? Или нужны независмые каналы и 6 штук?
И для каждого пина порта у нас может быть задана только одна альтернативная фукнция(т.е. выод процессора либо как gpio либо как альтернативная функция)
И ещё что нужно будет, чтобы распространять плату через их огромные сети дистрибьюции?
В принципе можно уже попробовать силами участников форума начать рисовать плату для arduino, если быстро сумеем сделать, то существует вероятность, что она и будет первым отладочником для нового процессора. Интерфейсы процессора описаны в документации на форуме, теоретически могу выложить и распиновку.
RE: Роботы - Added by trott over 12 years ago
пожалуйста, сделайте ШИМ с фазовым сдвигом. Пусть период будет одинаковым, но чтобы ШИМ могли не стартовать не одновременно.
RE: Роботы - Added by krufter_multiclet over 12 years ago
А можете написать для какого применения? В принципе добавить четыре регистра на фазовый сдвиг и оставить один период можно сделать быстро.
RE: Роботы - Added by trott over 12 years ago
мне нужно управлять асинхронным двигателем. В принципе это уже описывалось в теме "PWM хотелки" http://multiclet.com/community/boards/4/topics/517?r=568#message-568
RE: Роботы - Added by krufter_multiclet over 12 years ago
В принципе же можно каналы включать по системному таймеру.
RE: Роботы - Added by trott over 12 years ago
можно и по системному таймеру, а можно и по одному прерыванию ШИМ взвести 6 таймеров с 6 разными временами и с единичным срабатыванием.
у первого таймера задать время pi/3*T, у второго 2pi/3*T и т.д. Можно вообще сдалать на таймерах без использования ШИМ.
RE: Роботы - Added by krufter_multiclet over 12 years ago
В принципе сейчас можно обсуждать новую отладочную плату. Теоретически на ней можно сделать совместимость arduino, однако остальные выводы также будут разведены как на плате LDM. Вопрос стоит ли делать совместимость для arduino, если размеры платы будут не меньше чем сейчас плата LDM. Также принимаются рекомендации по установке на плату различных датчиков и т.п. Но желательно писать быстрее все свои идеи.
RE: Роботы - Added by trott over 12 years ago
Нужно как минимум 4 канала АЦП(в HW1-MCp04 почему-то только один) и 3 или 6 каналов ШИМ с фазовым сдвигом.
RE: Роботы - Added by krufter_multiclet over 12 years ago
Будет 8 каналов АЦП в новом процессоре на борту, ШИМа пока 4 канала, а вот фазовый сдвиг и 8 отдельных каналов ШИМ со своим периодом я активно лоббирую, но много факторов должно сложиться чтобы появился 8 канальный ШИМ с фазовым сдвигом. Датчики может для измерения температуры, акселлерометр, магнетометр, гироскоп или что-нибудь ещё поставить?
RE: Роботы - Added by trott over 12 years ago
у меня на руках есть STM32F4-discovery. на нем есть температура, акселерометр. Без гироскопа вертолеты не летают, но гироскоп не универсальное устройство.
Проконсультировался еще с одним человеком и составили следующий приоритет: температура, акселерометр, магнитометр, гироскоп.
вопрос: как насчет GPS/Глонасс?
RE: Роботы - Added by krufter_multiclet over 12 years ago
GPS/Глонасс думаю удобнее подключить отдельно к плате, а на плате сделать разъём для удобства подключения. Просто для хорошего приёма в помещениях нужно внешнюю антенну цеплять, иначе на дешёвых GPS модулях приём неуверенный и большое расхождение с реальностью. Предлагаю продолжить обсуждения новой отладочной платы в отдельной теме. Разработчик отладочной платы обещал прислушаться к советам и рекомендациям. Нам нужно всё собрать в одну корзину и предоставить это разработчику. Принимаются любые предложения!
RE: Роботы - Added by PaulAS almost 12 years ago
Еще, как вариант, сделать аналог во этого устройства:
http://www.makeblock.cc/me-baseboard-v1-0/
http://www.neobot.ru/products/bazovaya-plata-2-v-1-me--baseboard-v10
http://robocraft.ru/shop/index.php?route=product/product&product_id=402
И с датчиками и другими комплектующими (их аналоги можно позже разработать, а для начала, закупать) от набора "Makeblock" будет неплохой вариант для импортозамещения робототехнического набора в Российские школы. И главное можно уже продавать как опцию к набору в качестве более производительного контроллера.
Что думаете?
RE: Роботы - Added by krufter_multiclet almost 12 years ago
Да мы пытаемся активно развиваться в области робототехники. У нас есть взаимодействие с Екатеринбургской компанией, которая занимается производством и разработкой специальных комплектов для занятия робототехникой в школах. Там интересная реализация системы для пошагового освоения, так что пользователь например может крутить двигателем двумя путями: пока у него нет опыта он пишет простую программу для мультиклеточного процессора, который например по UART передает все параметры контроллеру, который отвечает за движение двигателя(например крути вперед 10 раз). По мере освоения процессора пользователь может управлять тем же двигателем уже с мультиклеточного процессора напрямую.
И ещё много интересного эта компания делает.
По квадрокоптерам у нас есть зачатки: для акселлерометра, гироскопа и компаса от компании mishinmachines написана библиотека для мультиклеточного процессора. Двигателями для квадрокоптера тоже крутили через ШИМ. Сейчас необходимо прикрутить алгоритмы стабилизации, собрать макет и отладить, но это не быстрая задача, нужно время и свободные человеческие ресурсы для этой задачи.
RE: Роботы - Added by montesquieu almost 11 years ago
Могу помочь с этим направлением и наваять либу для управления сервоприводами Dynamixel марки Robotis. Трудно сказать, что они стали стандартом де-факто в образовательной робототехнике, но определенная популярность у них есть. Правда, в основном зарубежом, из-за их стоимости.
RE: Роботы - Added by krufter_multiclet almost 11 years ago
montesquieu wrote:
Могу помочь с этим направлением и наваять либу для управления сервоприводами Dynamixel марки Robotis. Трудно сказать, что они стали стандартом де-факто в образовательной робототехнике, но определенная популярность у них есть. Правда, в основном зарубежом, из-за их стоимости.
У нас завтра как раз будет на Иннопроме презентация с роботами, если вы из Екатеринбурга, то можете подойти к 10 часам в 4 зал, 4-го павильона.
Мы только за, если вы сделаете библиотеку, ну и раз у вас есть плата, то можно и опробовать). Завтра уточню какой марки сервоприводы у компании УНИКСС.
RE: Роботы - Added by montesquieu almost 11 years ago
Увы, я не из Екатеринбурга. А так бы приехал. Да, плата есть, сервы с RS485 тоже есть. Так что дело за малым - освоиться с Мультиклетом. Уточните марку сервоприводов, самому интересно.
RE: Роботы - Added by krufter_multiclet almost 11 years ago
montesquieu wrote:
Увы, я не из Екатеринбурга. А так бы приехал. Да, плата есть, сервы с RS485 тоже есть. Так что дело за малым - освоиться с Мультиклетом. Уточните марку сервоприводов, самому интересно.
Мы поможем освоить Мультиклет. По сервоприводам и с кратким отчетом о мероприятии завтра отпишусь.
RE: Роботы - Added by krufter_multiclet almost 11 years ago
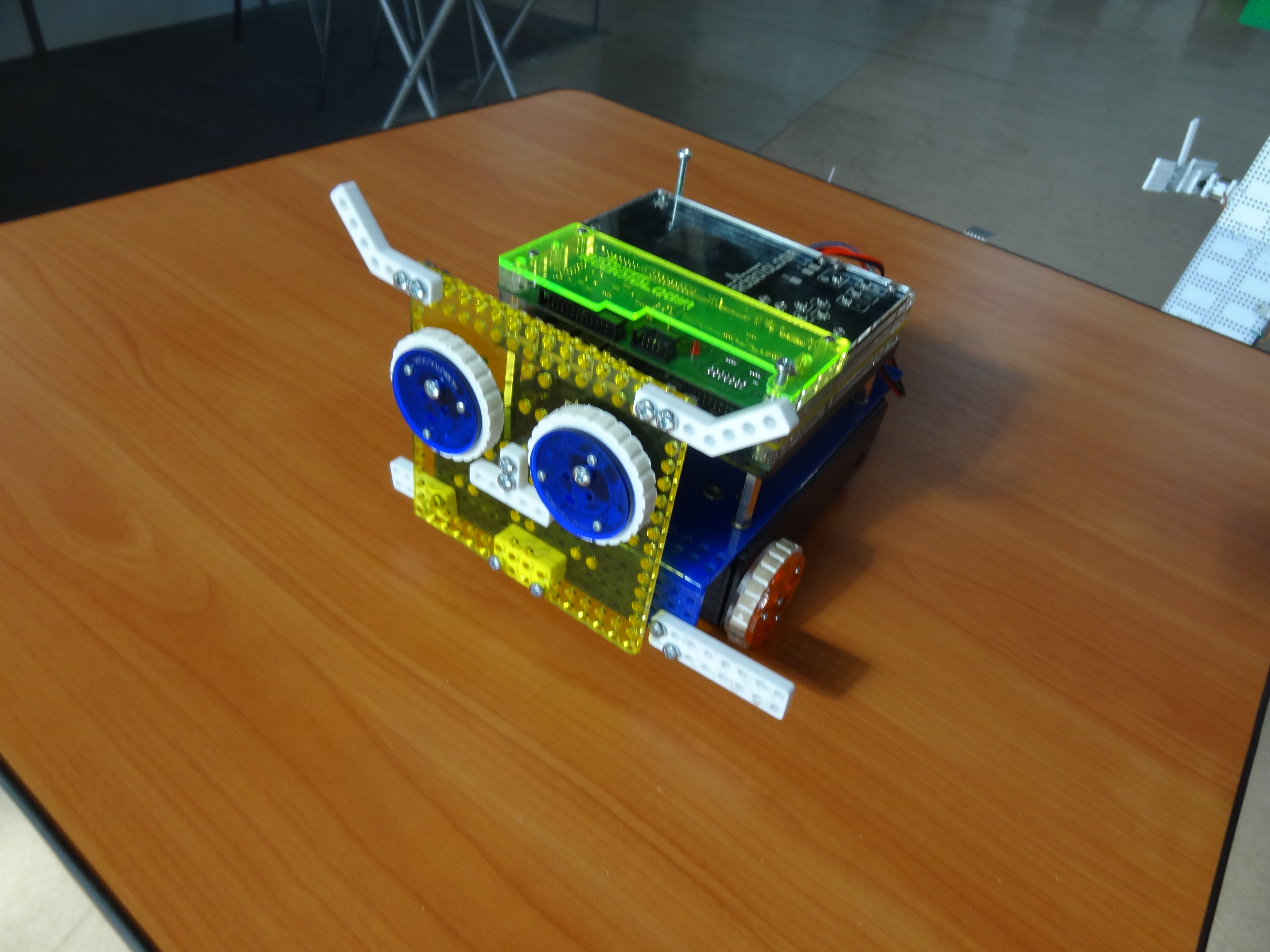
Разработкой роботов и платформы Роботология занимается компания УНИКСС, с которой мы сотрудничаем. Одной из целей данной компании является развитие робототехники среди детей и школьников, а также переход на отечественную элементную базу, чтобы всегда можно было изготовить все необходимое.
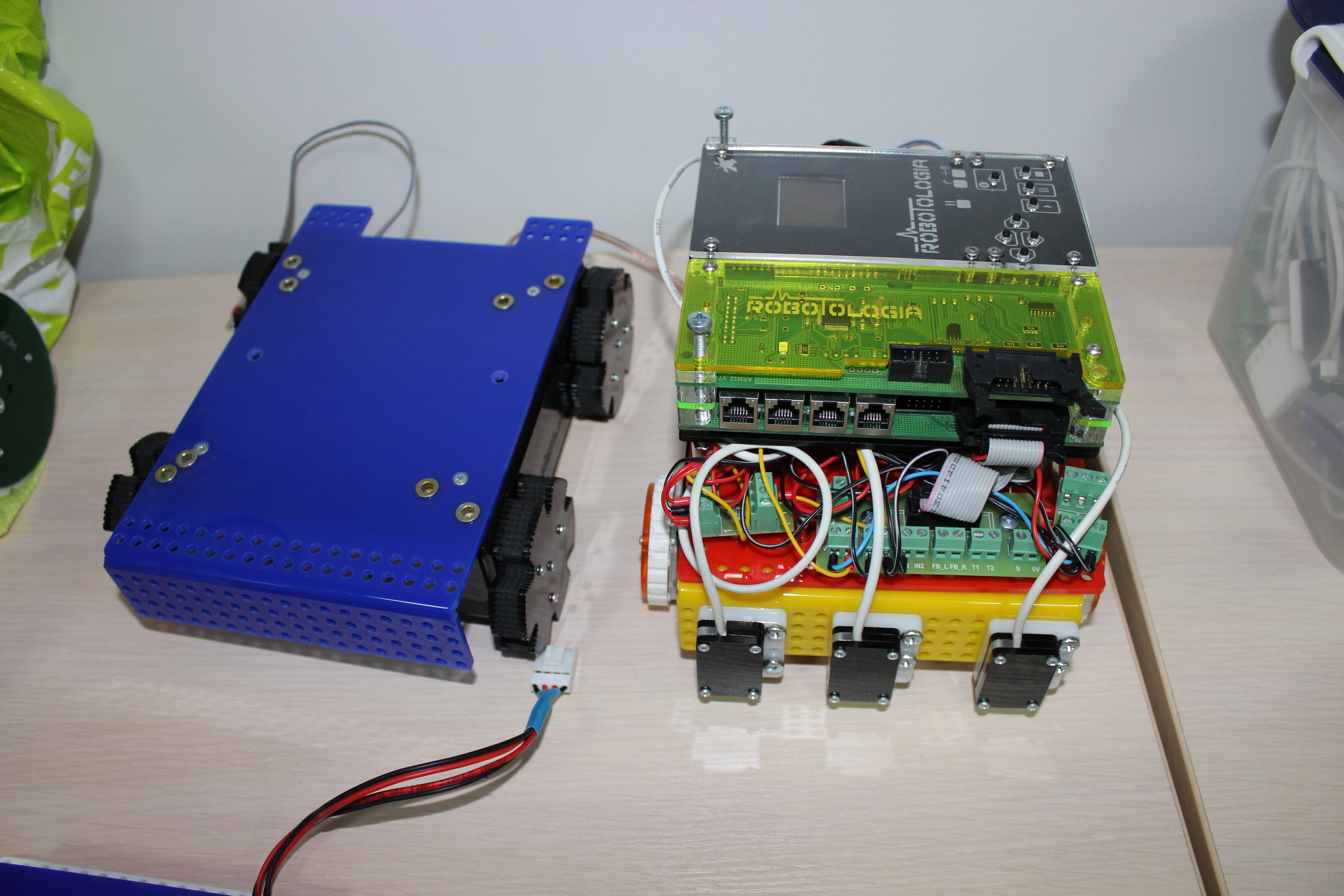
Они сами изготавливают детали на 3D принтере, отливают необходимые формы, сервоприводы, и контроллер Роботология как и процессорные модули подключаемые к нему тоже их разработки.
Основным параметром платформы Роботология является, то что она позволяет очень быстро начать работу с новым процессором, например сейчас изготовлен модуль с процессором Мультиклет P1.
Достаточно написать присвоение переменной MOTOR1_SPEED = 60 и робот поедет. Но далее по мере развития школьник может начать самостоятельно управлять двигателем напрямую через процессор Мультиклет P1 и постепенно осваивать все новые возможности процессора.
Кроме того в платформе учтена специфика работы с детьми, а именно установлены защитные микросхемы и резисторы. Короткое замыкание для такой платформы является обычным явлением, в этом случае погаснет светодиод и пользователь будет уведомлен, что необходимо устранить проблему для продолжения работы.
Также школьнику с данной платформой возможно изучение схемотехники и других основ подключения элементов, начиная от простого к сложному.
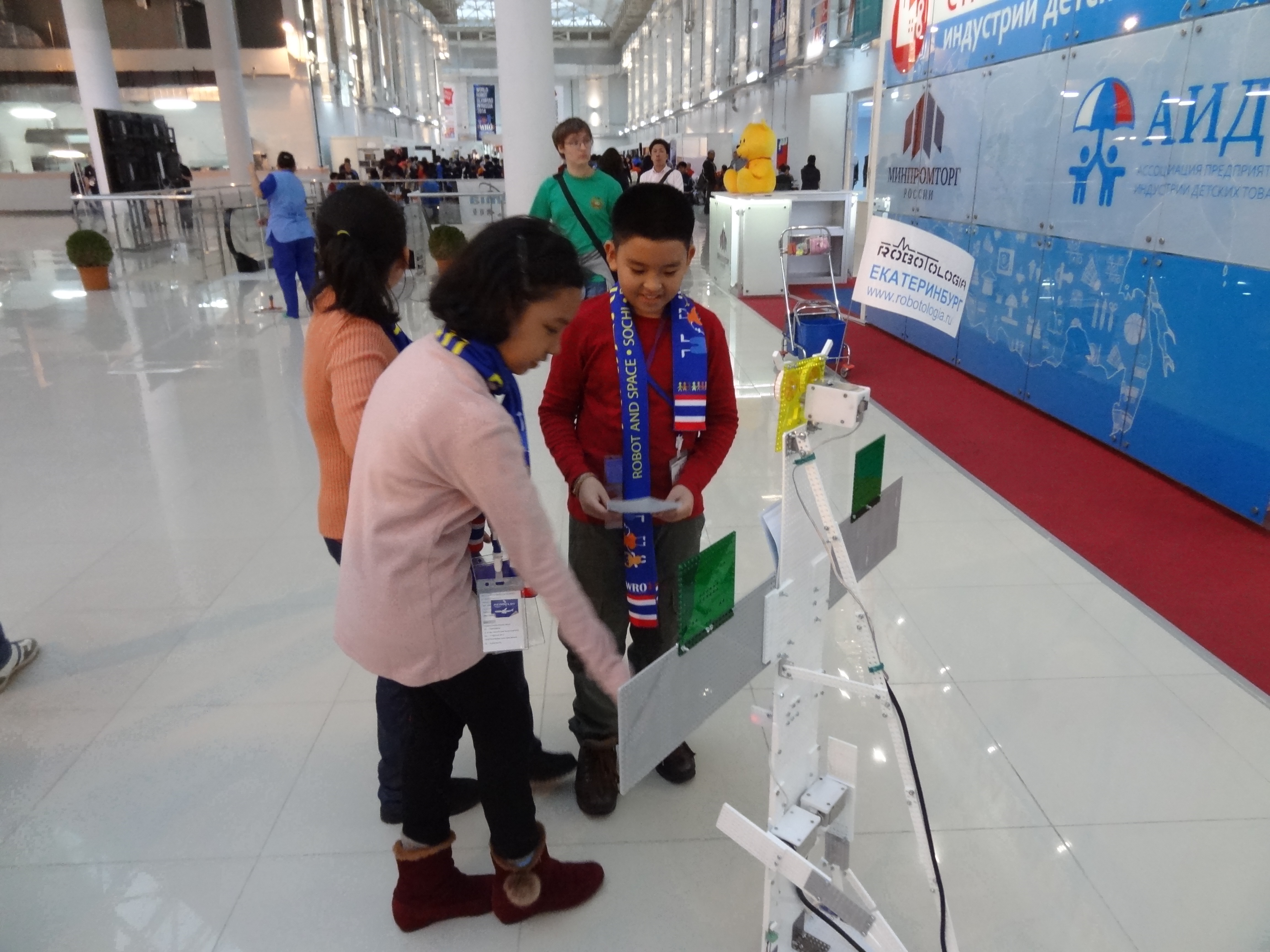
И в компании УНИКСС есть планы по применению процессоров Мультиклет не только в простых робототехнических устройствах, но и отдельно от платформы в низкоорбитальных и других аппаратах. У школьников, которые работают с данной платформой имеется также сотрудничество с НПОА, что способствует их развитию в плане космических аппаратов.
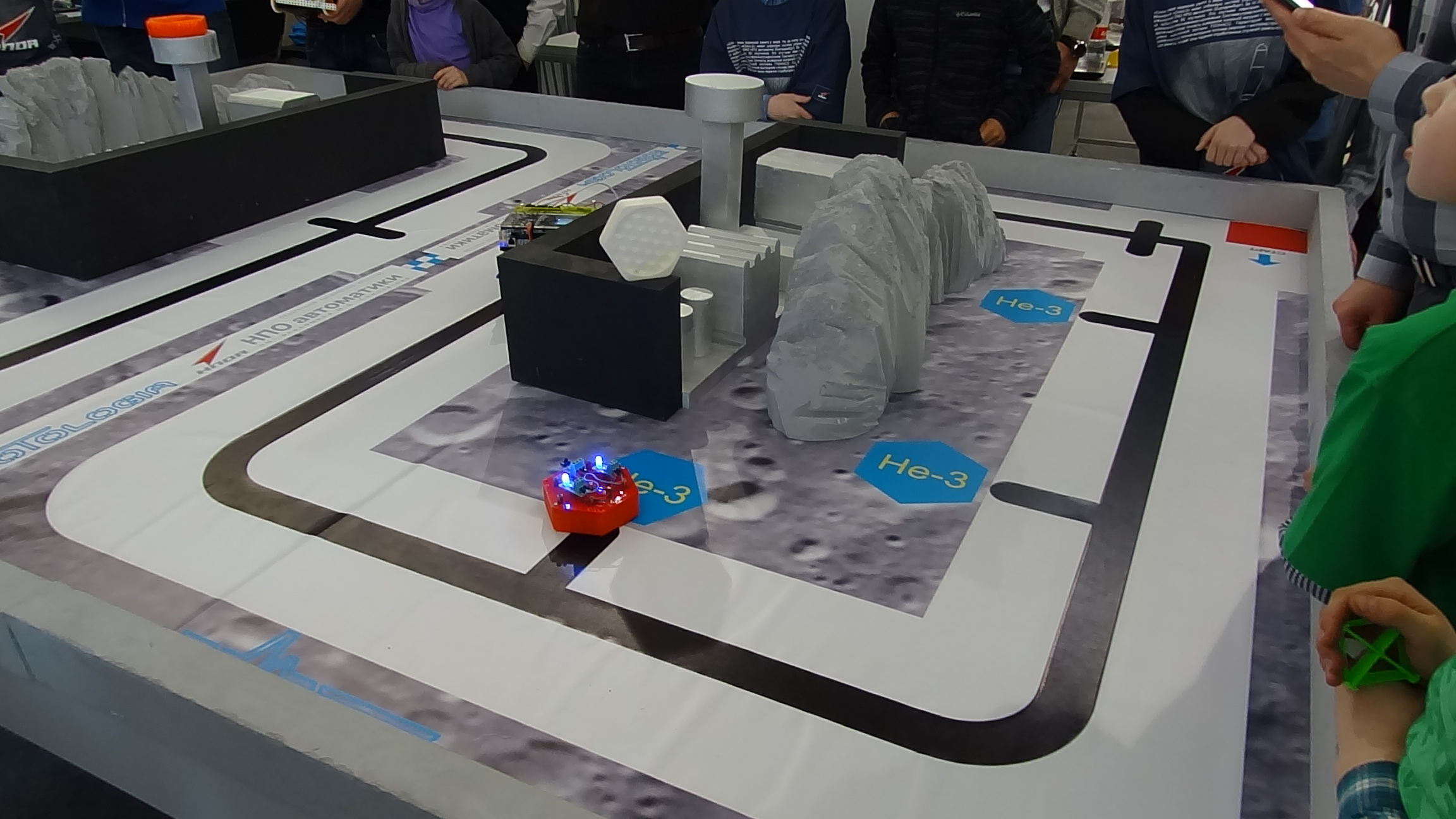
На базе данных платформ проводятся соревнования "Лунные роботы" и др. Во вложении к данному сообщению можно найти краткое описание платформы.
Роботы были выставлены на Иннопром 2015, были проведены доклады о мультиклеточных процессорах и платформе Роботология, а также продемонстрированы работы школьников, участвовавших в международных соревнованиях. Конечно на мероприятии присутствовало не так много слушателей как хотелось, но что-то новое может начинаться и с одного человека, главное сделать первый шаг.




{kind=link}
{kind=link}
И еще видео одного из роботов: https://youtu.be/EqXNmaTFsdE
| ROBOT_robotol_V1.pdf (13.4 MB) ROBOT_robotol_V1.pdf | |||
| DSCN1520.JPG (3.18 MB) DSCN1520.JPG | |||
| DSC04599.JPG (2.9 MB) DSC04599.JPG | |||
| DSC04672.JPG (2.75 MB) DSC04672.JPG | |||
| DSC04709.JPG (565 KB) DSC04709.JPG | |||
| DSC04040.JPG (3.04 MB) DSC04040.JPG | |||
| IMG_1232.JPG (5.87 MB) IMG_1232.JPG | |||
| IMG_1245.JPG (5.67 MB) IMG_1245.JPG | |||
| IMG_1242.JPG (5.56 MB) IMG_1242.JPG | |||
| multiclet_robot.jpeg (230 KB) multiclet_robot.jpeg |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
RE: Роботы - Added by montesquieu almost 11 years ago
Спасибо за отчет! Интересно, а чем им master-модуль helper'a не понравился? Или их просто мало было, когда они начинали?
RE: Роботы - Added by krufter_multiclet almost 11 years ago
montesquieu wrote:
Спасибо за отчет! Интересно, а чем им master-модуль helper'a не понравился? Или их просто мало было, когда они начинали?
Они же ставят дополнительную защиту на выводы, кроме того им важен размер, т.к. модуль для нового контроллера будет в разы меньше. Плюс ко всему у них минимальный состав компонентов на плате. Master-модуль LDM это то, что необходимо для детального и полного изучения всей периферии. Хотя к модулю компании УНИКСС тоже можно подключать периферию, если изготовите дополнительные платы расширения. У УНИКСС направленность именно на робототехнику в основном для школьников, хотя постепенно они пойдут и дальше.
Я, думаю, немного позже напишем статью для Хабра про Роботологию и применение наших процессоров в ней.
RE: Роботы - Added by VaalKIA almost 11 years ago
krufter_multiclet wrote:
montesquieu wrote:
Я, думаю, немного позже напишем статью для Хабра про Роботологию и применение наших процессоров в ней.
Да, только не как в прошлый раз, когда это отдали на оутсорс школьникам и они дружно забили.